
Nun werden wir unsere Software RevPiPyLoad auf dem RevolutionPi installieren und das MQTT System aktivieren.
RevPiPyLoad installieren
RevPiPyLoad kann einfach über die Kunbus Paketquellen bezogen werden. Für die Installation melden wir uns per SSH am RevolutionPi an, bzw. nutzen einen angeschlossenen Monitor.
pi@RevPi ~/ $ sudo apt-get update # Installieren pi@RevPi ~/ $ sudo apt-get install revpipyload
Sollte es schon installiert sein, muss es mindestens auf die Version 0.7.2 aktualisiert werden!
pi@RevPi ~/ $ sudo apt-get update # Updaten (alles) pi@RevPi ~/ $ sudo apt-get dist-upgrade
RevPiPyload für MQTT konfigurieren
Die einfachste Variante der Konfiguration ist die Verwendung unseres grafischen Konfigurationstools RevPiPyControl. Bevor wir damit auf den Revolution Pi zugreifen können, muss die XML-RPC Schnittstelle in RevPiPyLoad aktiviert werden. Dies könnt ihr detailliert unter „RevPiPyLoad Installation auf den RevPi“ in unserem Schnellstart nachlesen.
Wenn eine Verbindung per RevPiPyControl mit dem Revolution Pi hergestellt ist, öffnet man die Optionen über „PLC->PLC Optionen…“. Im unteren Teil findet man „MQTT Übertragung des Prozessabbilds“. Diese Option wird aktiviert! Über den Button „Einstellungen“ werden die MQTT Parameter konfiguriert. Wir setzen den „Base topic“ auf „datensammlung/revpi01„, das Sendeintervall auf 15 Sekunden und die Brokeradresse auf die IP-Adresse des Raspberry Pis! Benutzername und Kennwort setzen wir gemäß den vergebenen Daten aus dem vorherigen Blogeintrag. Alle Einstellungen mit den „Speichern“ Schaltflächen übernehmen. Das System wird nun gestartet und sendet alle 15 Sekunden die Werte der IOs, bei denen in piCtory der „Export“ Haken aktiv ist, an den Broker. Wir können die Konfigurationsdatei von RevPiPyLoad auch direkt an unserem Revolution Pi bearbeiten und MQTT aktivieren. Dafür öffnen wir Diese in einem Texteditor: In dem Editor finden wir alle MQTT Einstellungen in der Wir setzen Nun mit Strg+X die Änderung speichern und das Speichern mit y bestätigen. Der RevPiPyLoad Dienst muss nun neu gestartet werden um die Änderungen zu übernehmen. Ab jetzt sendet RevPiPyLoad alle 15 Sekunden die Werte der IOs, bei denen in piCtory der „Export“ Haken aktiv ist, an den Broker. Auf dem MQTT Broker können wir wieder mit Nun empfangen wir die Daten per MQTT auf unserem Cloud-Server. Dieser soll die Daten nun speichern. Dies zeigen wir in dem nächsten Blogeintrag.
pi@RevPi0000:~ $ sudo nano /etc/revpipyload/revpipyload.conf[MQTT] Sektion.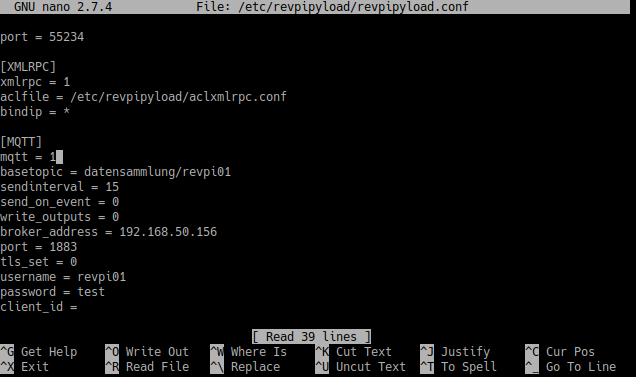
mqtt = 1, den basetopic = datensammlung/revpi01 und das sendinterval = 15. Für die broker_address setzen wir die IP Adresse des Raspberry Pis und auch username und password auf die vergebenen Werte aus dem vorherigen Blogeintrag.pi@RevPi0000:~ $ sudo service revpipyload restartÜbertragung testen
mosquitto_sub die Nachrichten überwachen:pi@raspberrypi:~ $ mosquitto_sub -u systemreader -P test -t "#" -v
datensammlung/revpi01/io/door_corridor 0
datensammlung/revpi01/io/door_workshop 1
datensammlung/revpi01/io/temp_heater 225
datensammlung/revpi01/io/temp_outside 287
So geht es weiter