
This program is the graphical interface to access the RevPiPyLoad!
Access to the RevPi core is only possible if an xmlrpc value greater than 0 is used for RevPiPyLoad!
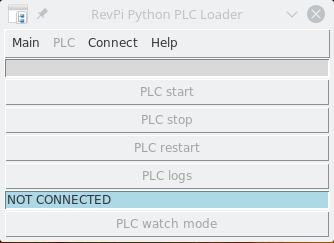
After the Installation the program can be started.
(Or from the sources with the file revpipycontrol.py)
Create Connections
The RevPi core systems can be set up via the menu item “Main-> Connections …” .
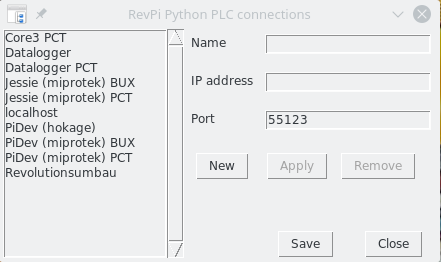
- Name: Freely selectable for easy identification
- IP-Adress: Adress from RevPi-Core running on the RevPiPyLoad
- Port: The port from the XML-RPC-Server (default: 55123)
After entering the data, click “Accept” and “Save”. The list is then stored in the user profile and is available again at every program start.
Establish connection
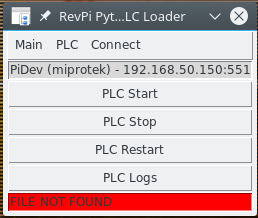
Via the menu in the main program you can connect via “Connect-> RevPiName”. The name and address are then displayed in the upper field. The bottom box shows the status of the Python program. Whether it is started or not or exists at all. If a program has not yet been transferred, “FILE NOT FOUND” is displayed.
Transfer Program
The program management is started via the menu “PLC-> PLC program …”.
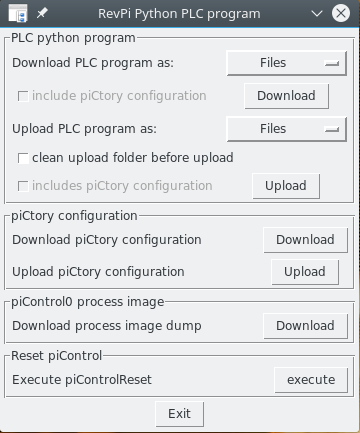
Via “Upload PLC program as” you can now upload individual “files”, the entire contents of a “folder” or an Archiv file can be uploaded.
By clicking on “Upload”, a file window is opened, via which a file or a folder can be selected.
We’ll upload our test program “test_dio_mainloop.py”.
Change Settings
After the program has been transferred, it must be set as a startup program. The settings are opened by clicking on “PLC-> PLC options …”.
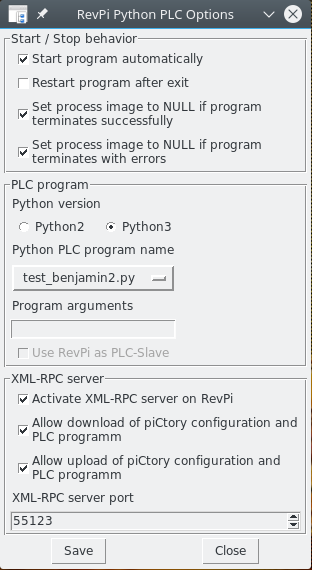
Here, next to all other settings for RevPiPyLoad, the uploaded program is selected under “Python PLC program name”.
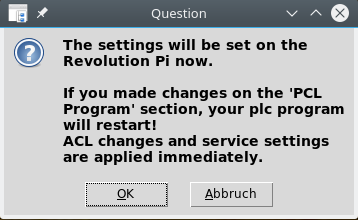
After clicking “Save” the RevPiPyLoad daemon can be restarted automatically, which then uses the new Settings.
Reading the logfile
By clicking on the button “PLC Logs” in the main window, the status of the RevPiPyLoad daemon and the newly uploaded program can now be viewed:
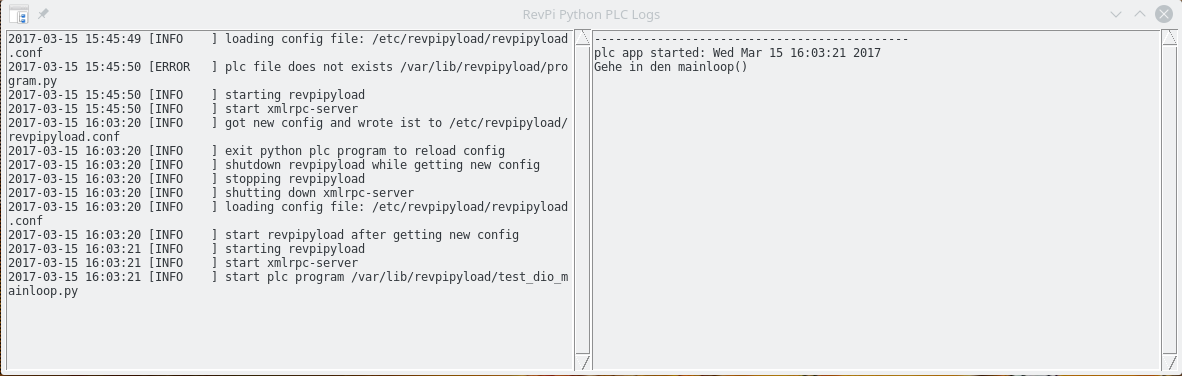
On the right side you can see that the program was started and generated an output “Go to the mainloop ()”.
NOTE: The entries on the left with [INFO] are shown to us because we added a “-v” (verbose) for the daemon on the RevPi in the /etc/default/revpipyload file. By default, only warnings, errors and “worse” are displayed